





専攻に入ってから今まで色々面白いことを学ぶことができて、 研究が楽しく感じています。皆さんも学科の紹介に参加して、 自分がやりたいことを見つけるようにしてください。
普通の吸盤が付着しない湿った壁でも強く付着可能な、マイクロサイズの吸盤の付着性について研究を行っています。通常の吸盤は湿った面には付着しづらい特徴があります。ところが、サイズをマイクロメートルオーダーまで小さくすると、吸着性が飛躍的に向上します。吸盤が小さいので、一見デバイス表面には何もついてないように見えますが、実験すると不思議なことにちゃんと付着力が発生します。このように、サイズの工夫ひとつで、(直観に反した?)これまでにない新しい効果を得られるのがマイクロマシン研究の面白い点です。最終ゴールは、マイクロ吸盤アレイをロボットの足に付けることです。悪条件の壁を垂直に登ることができるロボットが実現できると考えています。
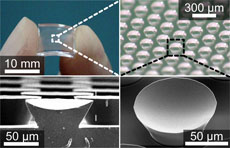
透明ゴムの表面に、目でやっと見えるくらいの吸盤があります。
私はベトナムで一年間大学に通った後、留学生として日本にやってきました。ベトナムにいたとき、日本に対して抱いた最も強い印象は、日本では素晴らしいロボットが研究されているということでした。しかし、当時ベトナムではロボットの研究はほとんどやられておらず、やるならやっぱり日本に留学するのが一番正しいと思って、日本を選びました。東大には1年の教養学部から入学し、その中で機械情報工学科の存在を知りました。機械情報工学科では、ロボット技術を軸として、制御や神経モデルといった高次レベルの研究から、アクチュエータやセンサなどボトムレベルの研究までロボットに関する総合的な研究がなされています。こうした点が魅力的で、かつ非常に重要だと思い、進振でこの学科への進学を決めました。また、この学科には、同じベトナム人留学生の先輩方がたくさん在籍されており、彼らから「機械・情報・メカトロニクス」の三つ分野について勉強できるというこの学科のよい評判を聞いていたことも、選んだきっかけになりました。
研究室で楽しいバーベキュー。
私はいま修士課程2年生ですが、来年度は本学科で博士課程への進学を希望しています。これまでの研究成果を、本格的にロボットに適用していきたいですね。マイクロ吸盤構造と小型触覚センサをロボットの足裏などに配置して、ツルツルすべる壁面を難なく登るロボットを実現したいです。現在、研究室に通って修士研究に取り組む毎日ですが、研究室には気さくで面倒見のよい先輩が多く、一緒にマイクロマシンについて、ワイワイ楽しく議論したりしています。皆さんも、こんなに充実して楽しい機械情報工学科の一員になってみませんか!