





進学先の選び方で、今後どういったスキルを持った人間に成長できるかが大きく左右されます。 色々な学科の研究内容をみて、学術的な面白さももちろんですが、この研究を遂行する過程でどういうスキルが身につくかという視点で見てみてはどうでしょうか。それが自分の思い描く将来像にマッチしていれば、夢中になって、充実した研究生活を送れると思います。
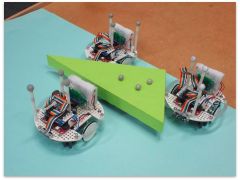
卒業研究では、複数の移動ロボットで物体を取り囲み搬送する「ケージング協調搬送」のフォーメーション制御に取り組みました。大型の物体や重い物体を搬送する時、1台のロボットを大型化したりパワフルにしたりするアプローチもありますが、複数のロボットを使った協調搬送なら、1台1台のロボットはシンプルですみます。ケージング協調搬送は、物体を複数のロボットによって取り囲み、フォーメーションから抜けだせないようにした状態で搬送する方法です。これによって、フォーメーション形状を維持しながら全体として移動するという位置の制御だけで物体の形状や大きさに依存しない汎用的な搬送か?可能になります。どのようにフォーメーションを選び、どのような制御を行えば搬送を頑健に行えるかというアルゴリズムに主眼をおきながら、実機での実験で検証しました。
シンプルなロボットで物体取り囲んで運びます
機械情報工学科は、ハードウェアもソフトウェアも両方学べる学科です。実世界からデータを取ったり、実世界のものを操作するには、デバイスやロボットが必要です。一方で、ロボットを動かしたり、デバイスから取ったデータを有効に活用するには、知的なソフトウェアが不可欠です。授業では、演習が非常に充実していて、ハードウェア、ソフトウェアともに基礎的なところをしっかり体験してから、研究室に配属され自分の研究に進んでいきます。演習資料はかなり厚みがあって、後からながめてみると、これだけの演習をこなしてきたのだと自信になります。 研究を進めていくにつれて、ソフトウェアに主眼をおく人、ハードウェアに主眼をおく人にだんだんとわかれて来ますが、いつもその両方の重要性を実感し、自分の中で閉じるのではなく、色々な興味・分野の人と議論し、協力しながら研究を進めています。
アルゴリズムを検証するために,ロボットのプロトタイプを自作します
私が機械情報工学科を選んだのは、オープンハウスでの研究紹介を見て、ロボットやデータ解析など、近い将来世の中で更に重要性を増すであろう技術を中心にした研究に共感し、将来このようなスキルのある人間になりたいと夢を感じたからでした。もともとプログラムの経験はほとんどありませんでしたが、演習や研究を通して学んで行く中で、すぐに、プログラムが難しいという段階から、先端的なアルゴリズムや、何が必要で世の中で求められているのかということが面白く、こちらを勉強していくという段階になりました。 機械情報工学科に入ってから、非常に良い環境の中で自分の身につけたいスキルを勉強出来ていると感じます。プライベートでは、研究室を飛び出し、大自然の中で体を動かしてリフレッシュするようにしています。
休みの日は体を動かしてリフレッシュ。神奈川の大山に登りに行きました